 September '08 Meeting Pics
September '08 Meeting PicsClick thumbnails for a larger view.
The free table. |

Another view of the free table. Lots of stuff is gone by now. |

Jeff Hove opens a free power meter. Lewis Dickson thinks 'don't let the power company catch you doing that'. |

Charles is doing some C++ programming. |

Ron Jesme's Carpet Rover robot. |
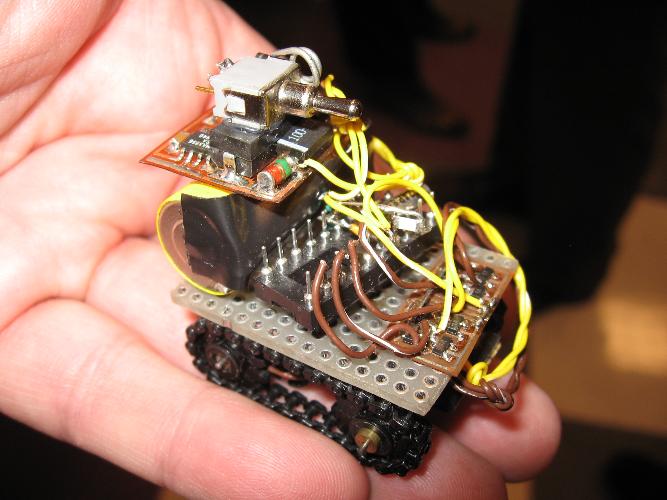
Ron Jesme's Micro Dozer robot. |

Jean-marie Bertoncelli brought his robot. |
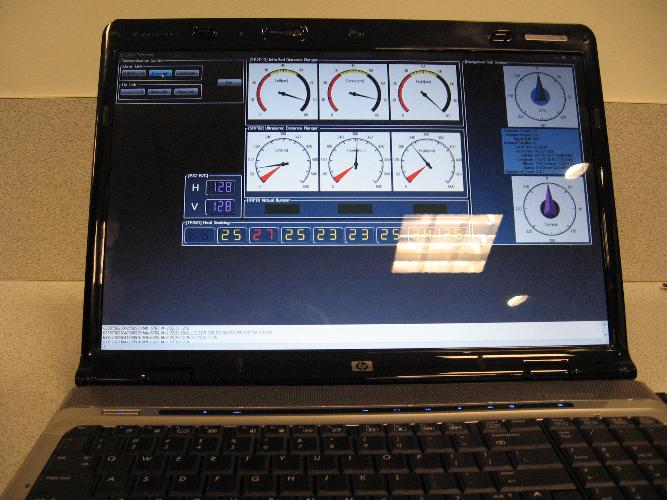
He has a wireless link and a control panel on his laptop. The laptop code is in C# using Microsoft Visual Studio. |

He also has this game console controller to send commands to the robot. |

This is his pan/tilt unit from Acroname. (I made sure these pictures turned out better than last month.) |

Side view. |

The other side. You can see the tilt servo. |

The back of two sonar units. |

One of his controller boards. I assume that is his radio module on the left. |

Jean-marie is explaining his robot to the new guys. |

Bill Arden had a Netburner eval board and a robot with a Netburner module. |
Bill's line follower with the Netburner module. |

Another view. |

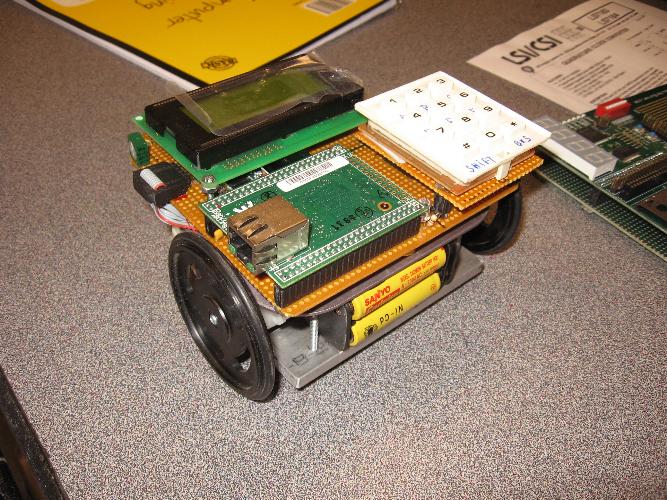
Jeff Sampson brought his red robot. |
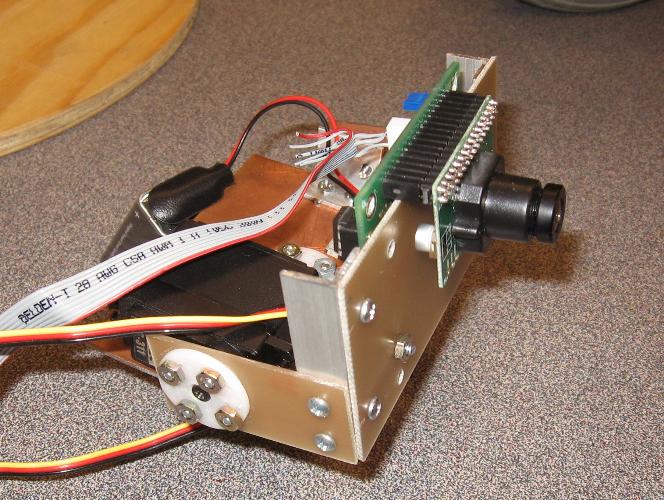
A pan/tilt unit for an AVRcam. This will go on the red robot. |

The pan/tilt unit has two R/C servos for positioning. |

The new sonar module for the red robot. |

The lower board has the sonar electroincs from the Research 3 robot. (The green one.) The top board will have an Atmel processor to interface to the AVRcam. |

This may be the drive train for Jeff's next robot. It is about half the weight as the parts on the red robot. (But maybe way too fast.) |

Bill explaining his line follower. |

Tom's radio-active shoes. |

Much discussion. |