 April '05 Meeting Pics
April '05 Meeting PicsClick thumbnails for a larger view.

Rob Turner brought his new Tribot robot. |
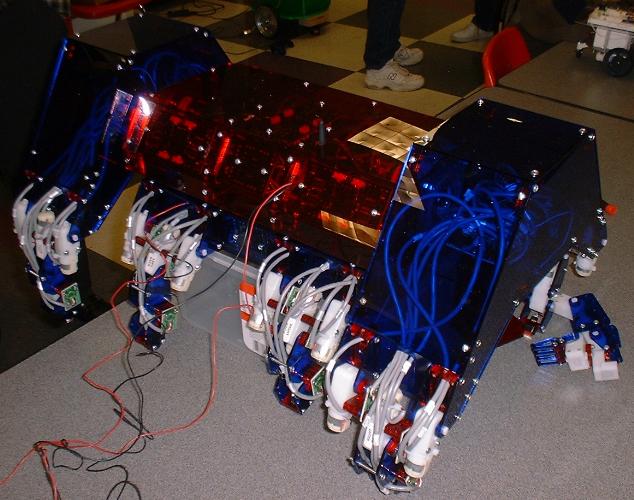
Top view. |
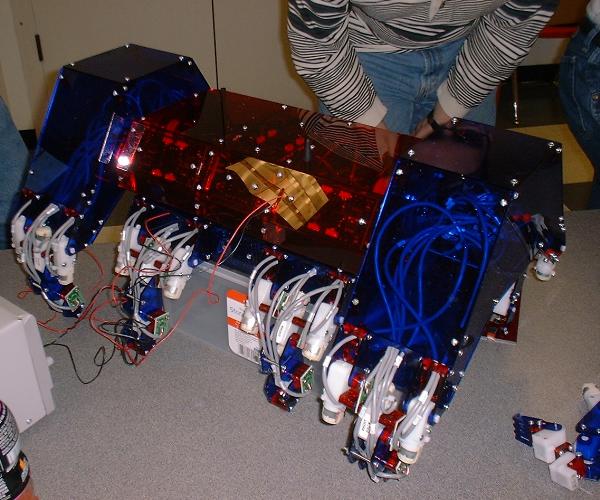
Another top view. |

Dead bug pose. |

Another bottom view. |

Closeup of legs. |
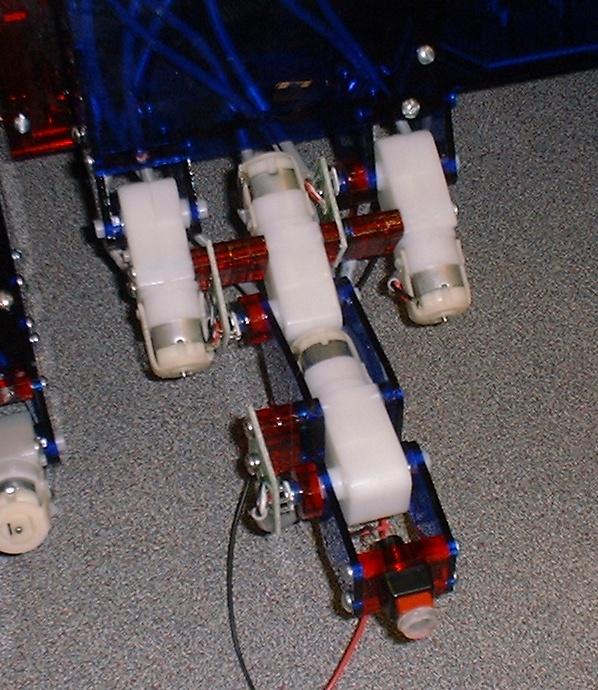
Closeup of a single leg. |

|

Rob explaining. |

|

|

Rob explaining his robot to Bruce Shapiro. |

|

|

Inside view of top section. |
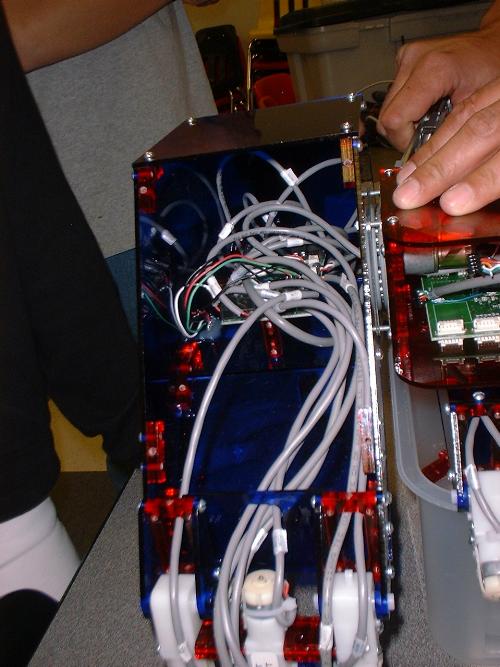
Inside view of end section. |

This looks like a power supply module. |

One of Rob's motor controller boards. |

|
Other stuff

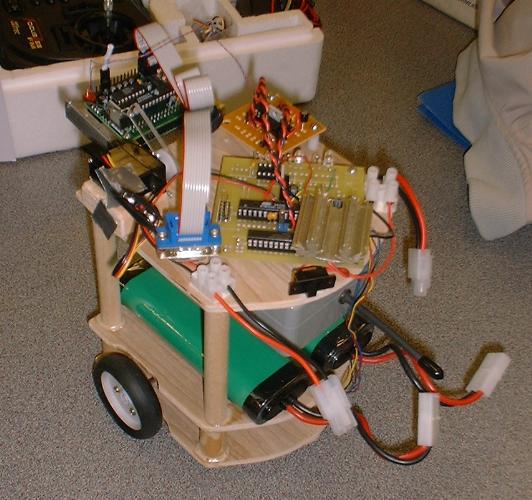
Jeff Sampson brought his Research 3 robot. Here it is assembled in the parking ramp. |

Driving to the main entrance on the Lobby level. |

In the classroom. It is currently driven with a USB gamepad. |

Richard Piotter's robot collection. |

Richard Piotter bought this vacuum flouresant display from BG Micro. |

It has a serial adapter board on the back. |

Closeup of the serial board. |

Bill Arden and Carrie Dickson discussing their line follower robots. |
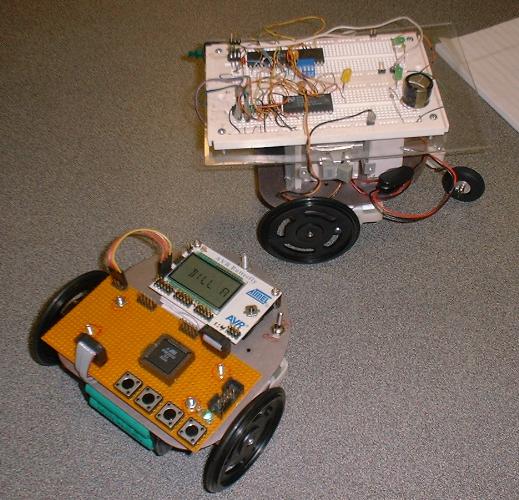
Carrie's robot on top and Bill's robot on the bottom. |

Bill's robot on its side. |

Bill's motor driver board. |
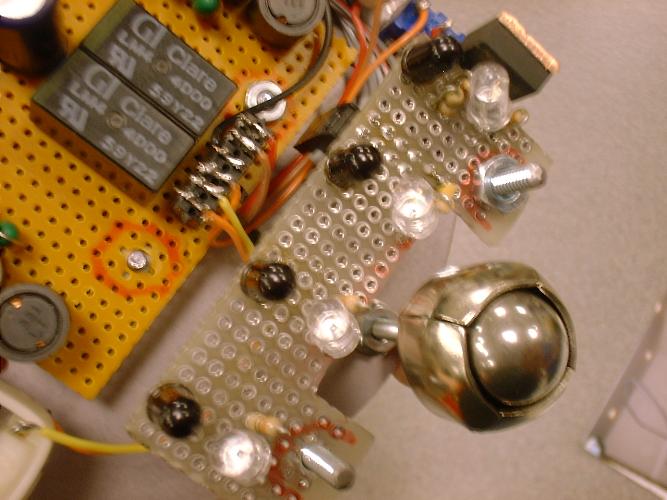
An out of focus picture of Bill's line following sensors. |

Bob Proctor has a new BitScope. |

Bob is displaying the waveform on his laptop computer. |

Trying to get the BitScope to trigger on one of Bob's motor controller projects. |
Peter Ellison's line follower robot. |

He has a CMUCam on the front for line following. It has an R/C servo to tilt the camera. (on the right) |

Another view of the camera. |

A homemade line follower sensor. |

A homemade R/C motor driver for an airplane project. |
Line maze

Peter Ellison's line follower robot. |

Bob Proctor's line follower robot. |

Bob's robot about to complete the maze. |

Bob's robot was able to run the hard maze. (it did a large amount of cheating) |