Operational description: I saw the results of the 1997 AAAI "Life
On Mars" competition. I thought to myself "I can do that well". (I probably
even told anbody that would listen. :-) So I started to design my rover
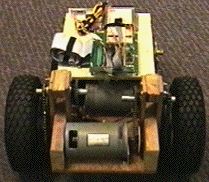
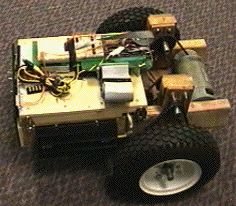
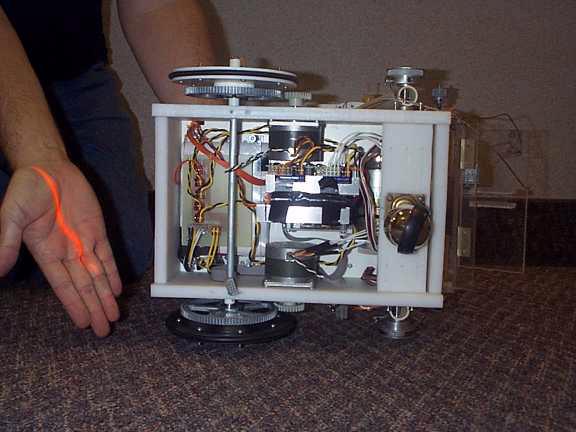
entry. I decided to use stepper motors for their inherent postitioning
capability. I designed up an arm to grap and lift the balls. I also decided
I needed a hopper to hold several balls. I needed a way to locate the balls
so I set out to design a laser ranging/vision system.
I was waiting because the rules for AAAI '98 were supposed to be
published "just after the first of the year", they weren't. I waited and
nothing. I got discouraged and did not get much done. Then we were invited
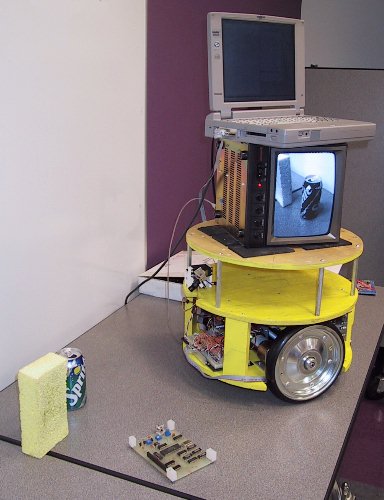
to a robot exhibition at the Science Museum of Minnesota. So I threw everything
together and got it done tthe day before the exhibition
A quick hack of software and I put it on the floor. I turned it on...
and the motors just buzzed. The arm motor didn't have enough torque to
lift the arm. The vision system would return ranging information, but I
didn't have software to use it. So it sat on the floor at the exhibition
and looked dumb.
Since then I have updated the stepper motor driver circuit and the
arm motor driver circuit. Rewired the whole thing. It now zips around the
floor. (Even on carpet.)
Now I just have to finish it.
 Jeff Sampson
Jeff Sampson Jeff Sampson - Minneapolis, MN
Jeff Sampson - Minneapolis, MN







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}